Error coefficients Generalized error series – Steady state error
There are two types of error coefficients.
1.) Static error coefficient
2.) Dynamic error coefficient
STATIC ERROR COEFFICIENT
They are of 3 different types.
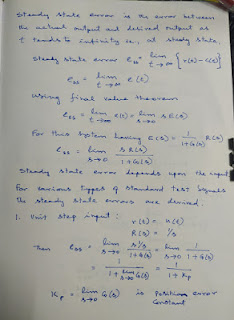
1.) Position error coefficient:- related to the output of the system. It is denoted by kp.
2.) Velocity error coefficient:- related to the rate of change of output of the system. it is denoted by kv.
3.) Acceleration error coefficient:- related to the rate of change of output. it denoted by ka.
- higher coefficient increases the steady state performance of the system
- cannot be used for unstable system
- error as a function of time not known
- difficult to stabilize the system
- used only with standard inputs step,ramp etc.,
DYNAMIC ERROR COEFFICIENT
used to express dynamic error
provides error signal as function of time
used with any type of input
provides a simple way of estimating error signal to arbitrary inputs and the steady sate error


Note:
Type of a system:
Number of poles at the origin of loop transfer function decides the type of a system. Loop transfer function is G(s)H(s). If no poles at origin, the Type 0 system. If one pole at origin then Type 1 system and so on. Type indicates the number of integrations, i.e., number of 1/s terms.



Kp, Kv and Ka and the steady state errors can be tabulated as under for different types.

Generalised error coefficients:
They are dynamic error coefficients and can be used for any input and error as a function of time is known.



There are two types of error coefficients.
1.) Static error coefficient
2.) Dynamic error coefficient
STATIC ERROR COEFFICIENT
They are of 3 different types.
1.) Position error coefficient:- related to the output of the system. It is denoted by kp.
2.) Velocity error coefficient:- related to the rate of change of output of the system. it is denoted by kv.
3.) Acceleration error coefficient:- related to the rate of change of output. it denoted by ka.
- higher coefficient increases the steady state performance of the system
- cannot be used for unstable system
- error as a function of time not known
- difficult to stabilize the system
- used only with standard inputs step,ramp etc.,
DYNAMIC ERROR COEFFICIENT
used to express dynamic error
provides error signal as function of time
used with any type of input
provides a simple way of estimating error signal to arbitrary inputs and the steady sate error



courtesy: Tutorials Point (India) Ltd.
Note:
In the case of a non-unity feedback system one has to be careful since the signal entering G(s) is no longer the actual error E(s). Error is the difference between the commanded reference and the actual output, E(s) = R(s) - C(s). When there is a transfer function H(s) in the feedback path, the signal being substracted from R(s) is no longer the true output C(s), it has been distorted by H(s).
Type of a system:
Number of poles at the origin of loop transfer function decides the type of a system. Loop transfer function is G(s)H(s). If no poles at origin, the Type 0 system. If one pole at origin then Type 1 system and so on. Type indicates the number of integrations, i.e., number of 1/s terms.




Generalised error coefficients:
They are dynamic error coefficients and can be used for any input and error as a function of time is known.


